UCundinamarca Radio





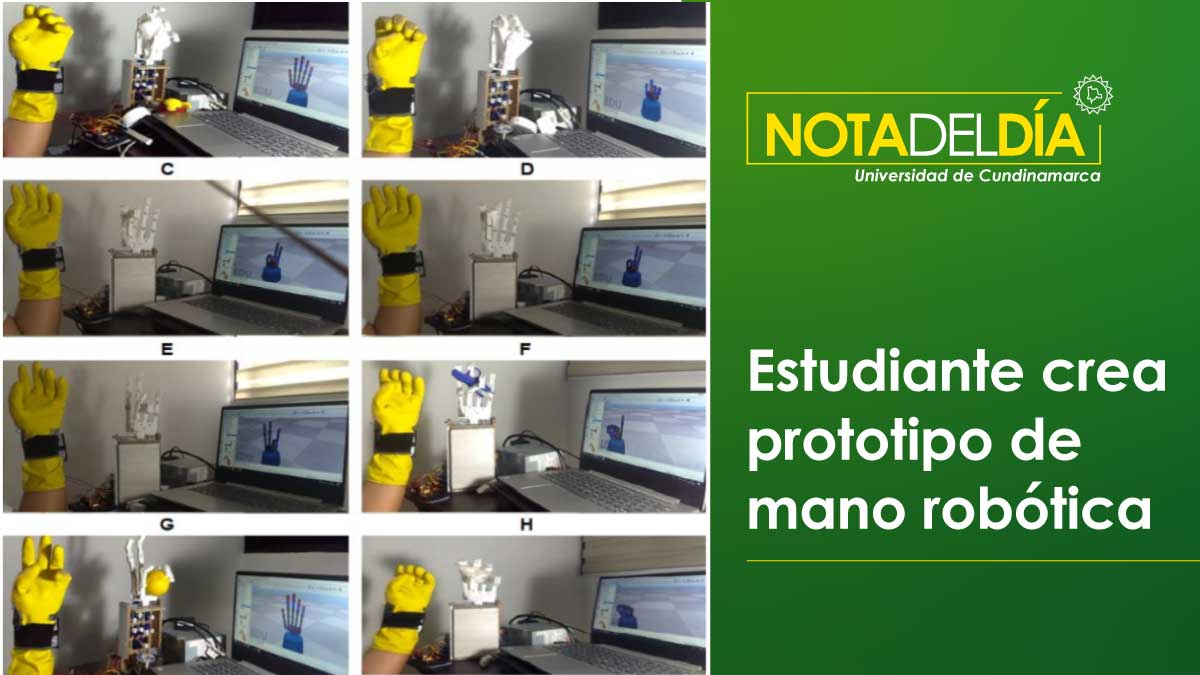
Estudiante crea prototipo de mano robótica
La investigación de Jeison Hernán Sáenz Sánchez, estudiante de Ingeniería Electrónica, surge del interrogante: ¿Cómo controlar a bajo costo un manipulador robótico antropomorfo, en tareas de manipulación de objetos en ambientes peligrosos?, desarrollo muy oportuno en un país donde según el Consejo Colombiano de Seguridad, anualmente se presentan más de 600.000 accidentes laborales.
A partir de esta pregunta, el estudiante procedió a desarrollar un sistema de control económico para un manipulador robótico antropomorfo, por medio de un guante sensorial para ser operado por una persona y así evitar el contacto con sustancias peligrosas que puedan afectar la salud.
Este trabajo de grado dirigido por el docente ingeniero Andrés Felipe Guerrero Guerrero se llevó a cabo en tres fases: Primero el proceso de diseño, construcción de las piezas y ensamble de la mano robótica antropomorfa, luego el boceto y construcción del guante sensorial y su circuito de acondicionamiento, por último, se identificó el modelo matemático del sistema y se desarrolló el algoritmo de control, para realizar distintas pruebas de agarre.
La mano robótica antropomorfa se realizó con el software de diseño asistido por computadora y las impresoras 3D, el sistema fue analizado e identificado con el software MATLAB, y el controlador fue desarrollado en tarjeta Arduino; la comunicación e interacción con el usuario se realizó mediante tarjeta de desarrollo Arduino, y el software académico CoppeliaSim y MATLAB para obtener un sistema final, que ofrece una solución para el desarrollo de actividades de alto riesgo en la industria, con bajo costo y materiales de construcción asequibles en el mercado local.
La elaboración del guante sensorial se hizo con un guante de látex debido a que, al flexionar y extender los dedos, el material retorna a su forma original, a diferencia del guante de tela, que tiende a deformarse en las articulaciones y con esto hace inestable el sensor; los sensores en el material velostat, con el circuito span y cero para alcanzar un buen desempeño de los sensores.
Cabe destascar que al aplicar el control PID se reducen las oscilaciones en los sensores, generadas por la vibración y los movimientos que no se relacionan en los dedos en la mano. La reducción de estas vibraciones hace que el prototipo de mano robótica sea estable, mejorando el funcionamiento.
Contexto
En el país los procesos industriales y químicos, como el manejo de materiales tóxicos o sustancias químicas representan un riesgo para la salud de los trabajadores, las cifras presentadas por el Consejo Colombiano de Seguridad señalan que en Colombia anualmente se presentan más de 600.000 accidentes laborales, y para los años 2016, 2017 y 2018 se evidenció 98.970 casos de intoxicación por sustancias químicas, y en el primer semestre del año 2020 se registraron 211.055 accidentes, 6.074 enfermedades y 198 muertes laborales.
Las cifras destacadas se evidencian en el sector de agricultura y ganadería, el área de silvicultura ocupó el primer puesto de accidentalidad en el país, seguido del sector de minas y canteras, industria manufacturera y el sector eléctrico, gas y agua. Los departamentos con mayor incidencia de accidentes son Magdalena, Meta, Antioquia, Risaralda y Cundinamarca.
Recomendaciones del autor para trabajos futuros:
Para mejorar el agarre del prototipo de mano robótica antropomorfa diseñado, se puede usar goma de silicona, con este material es posible cubrir las zonas que tienen mayor contacto con los objetos, dando como ventaja el aumento en la capacidad de agarre de objetos con formas irregulares y superficies lisas. El prototipo se podrá conectar con un brazo robótico articulado para realizar las tareas de desplazamiento de objetos y sustancias, que son comunes en los procesos industriales.
A partir de ajustes en los módulos de programación del sistema desarrollado en este trabajo, será posible implementar diferentes estrategias de control. Lo anterior permitirá el desarrollo de nuevos aportes en el área, utilizando el prototipo como una herramienta académica y de investigación.
Mediante el uso de sensores de fuerza, se puede dar mayor seguridad sobre la capacidad de agarre, al detectar perturbaciones por el deslizamiento del objeto agarrado. También, se pueden añadir un sistema neumático al guante, para darle una sensación de agarre al operador.